

On distingue différentes familles de modèle correspondant à trois échelles de représentation du trafic :
Échelle de représentation la plus fine et modélisent les interactions entre les véhicules. Les résultats sont les trajectoires individuelles des véhicules : positions, vitesses, accélérations, temps inter véhiculaires, etc.
Échelle de représentation la plus agrégée et représentent le trafic comme un flux. Les résultats indiquent principales caractéristiques de flux sur chaque tronçon du réseau : débits, concentrations, vitesses, etc.
Échelle de représentation intermédiaire, par exemple en regroupant les véhicules par paquet homogène et en modélisant les interactions entre chaque paquet de véhicules.
Les modèles microscopiques
Le modèle microscopique étudie un système composé d’éléments individuels : les véhicules. Chaque véhicule est défini dans le système grâce aux variables qui définissent sa trajectoire.
Pour modéliser les trajectoires des véhicules, on doit reproduire les principaux comportements de conduite. On distingue classiquement trois classes de comportements :
- les comportements de poursuite qui décrivent comment les véhicules adaptent leur position, leur vitesse ou leur accélération en fonction des véhicules environnants.
- les comportements de changement de voie qui décrivent la manière dont les véhicules change de voie de circulation (condition de dépassement et de rabattement, changement de voie de destination, etc.)
- les comportements d’insertion qui régissent la manière dont les véhicules s’insèrent sur une voie (régime de priorité, acceptation d’espace d’insertion, etc.)
Les modèles microscopiques combinent généralement ces trois types de modèles de comportement.
Variables
La trajectoire x(t) d’un véhicule
Les modèles microscopiques offrent la représentation la plus fine du trafic : ils calculent l’évolution des positions des véhicules dans le temps. Ces informations sont contenues dans la « trajectoire » du véhicule. Le graphique suivant représente la trajectoire d’un véhicule sur un tronçon.

Pour cette illustration, la trajectoire du véhicule représente l’évolution de la position du véhicule dans le temps. On connait ainsi les instants d’entrée et de sortie sur le tronçon, ainsi que ses phases d’accélération et de décélération.
A partir de la trajectoire x(t) d’un véhicule, on peut facilement obtenir la vitesse instantanée du véhicule v(t) = dx(t)/dt, ainsi que son accélération instantanée a(t) = d²x(t)/dt².
Les trajectoires de plusieurs véhicules
Il est également possible de représenter un flot entier de véhicules sur un tronçon autoroutier. L’illustration suivante représente les trajectoires de véhicules qui ont été filmés sur une voie d’un tronçon autoroutier (État de Californie, USA).
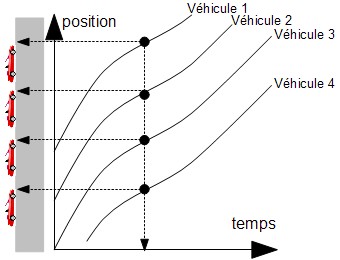
Sur cette illustration, on observe :
- les trajectoires de chaque véhicule,
- les temps inter-véhiculaires,
- les distances inter-véhiculaires.
- les vitesses instantanée des véhicules.
La vitesse instantanée de chaque véhicule correspondre la pente des trajectoires (pente élevée = vitesse élevée).
Ces trajectoires sont rarement mesurées sur le terrain. Ces dernières années, le recueil de trajectoires réelles de véhicules a été conduit à des fins de recherche. A titre d’illustration, la figure suivante illustre des trajectoires recueillies dans le cadre du projet de recherche américain NGSim (voir le site de la communauté du projet NGSim).

Comportement de poursuite
Lorsqu’un véhicule n’est pas précédé par un autre véhicule, il circule librement. Pour modéliser sa trajectoire, il suffit donc de connaître sa vitesse désirée, aussi appelée la vitesse libre.
Lorsqu’un véhicule est précédé d’un véhicule plus lent, il est contraint. Ce véhicule adapte alors son comportement de conduite : c’est le comportement de poursuite. De nombreux modèles de poursuite ont été proposés jusqu’à présent. Ils peuvent être classés en trois familles.
Les modèles de stimulus-réponse
Ils prennent en compte des paramètres de perception et de temps de réaction du conducteur. On retrouve dans cette catégorie le modèle Gazis-Herman-Rothery (GHR) ou encore le modèle de Chandler. Pour ces modèles, le calcul de la vitesse ou de l’accélération du véhicule est une fonction de la vitesse courante du véhicule, de la vitesse relative ou encore de l’inter-distance avec le véhicule qui précède.
Les modèles de contrôle et de sécurité
Dans ce cas, le comportement de poursuite est dicté par des règles de contrôle et de sécurité. On retrouve dans cette catégorie le modèle de Gipps (voir la page Wikipedia sur ce modèle) ou encore le modèle de Kometani-Sasaki. Pour ces modèles, la distance inter-véhiculaire est calculée de manière à respecter une distance de sécurité minimale avec le véhicule qui précède. C’est le modèle implémenté dans Aimsun.
Les modèles à loi macroscopique
Selon ce modèle, le comportement de poursuite doit avant tout être en accord avec les caractéristiques de l’écoulement (macroscopique) du trafic : loi de conservation des véhicules, diagramme fondamental, etc. On retrouve dans cette catégorie le modèle de Newell (voir la page Wikipedia sur ce modèle). C’est le modèle implémenté dans la plateforme de simulation SymuVia.
Comportement de changement de voie
Les comportements de changement de voie sont les plus difficiles à comprendre, à mesurer et à modéliser. Il existe deux types de changement de voie :
- les changements de voie de confort qui visent à améliorer son confort de conduite et éviter les gênes des autres véhicules,
- les changements de voie obligatoires qui visent à rejoindre une voie pour rejoindre une destination spécifique.
Changement de voie de confort
Un véhicule effectue généralement un changement de voie « de confort » afin de circuler à la vitesse qu’il désire : ce sont les manœuvres de dépassement et de rebattement classiquement observées sur les sections ayant plusieurs voies de circulation.

Plusieurs modèles de changement de voie de confort sont proposés dans la littérature. Parmi les plus connus, on retrouve :
- Le modèle de Gipps (référence)
C’est le premier modèle de changement de voie microscopique proposé dans la littérature (1986). C’est un modèle de décision qui considère successivement la nécessité, le désir et la faisabilité du changement de voie. Si le changement de voie est nécessaire, désiré et faisable pour un véhicule, alors la manœuvre est déclenchée. C’est le modèle implémenté dans Aimsun.
- Le modèle de Leclercq et Laval
C’est le plus récent des modèles de changement de voie discret (2008). Ce modèle calcule la probabilité de changer de voie en fonction de la différence de vitesse entre les voies. C’est le modèle qui est implémenté dans la plateforme de simulation SymuVia.
Changement de voie obligatoire
Lorsqu’un véhicule approche d’une bifurcation, son choix d’itinéraire peut le contraindre à rejoindre une voie spécifique. Il effectue alors un changement de voie dit « obligatoire ».

Comportement d’insertion
Lorsqu’un véhicule approche d’un « cédez-le-passage » ou d’un « stop », il s’engage uniquement si l’intersection est libre et que les conditions élémentaires de sécurité sont respectées. C’est sur ce principe que repose les modèles d’insertion. La réponse est binaire : le véhicule s’engage ou le véhicule ne s’engage pas. C’est généralement le résultat d’un modèle d’acceptation de créneaux.
Modèle d’acceptation de créneaux
Les modèles d’acceptation de créneaux considèrent que le véhicule non prioritaire s’engage si et seulement si aucun véhicule prioritaire ne se situe dans une zone de priorité, comme l’illustre la figure suivante.

Dans cet exemple d’illustration, le véhicule bleu doit céder le passage aux véhicules en provenance des deux sens de circulation. Le modèle considère donc deux zones de priorité dont les longueurs ne sont pas nécessairement identiques. Si un véhicule prioritaire se situe dans l’une de ces deux zones, alors le véhicule non-prioritaire attendra que le véhicule prioritaire ait quitté la zone de priorité avant de s’engager.
Selon le modèle utilisé, la longueur de la zone de priorité peut être fixe ou dépendre de paramètres. Dans le second cas, les paramètres permettent de prendre en compte les nombreux facteurs qui influencent les comportements d’insertion :
- distance de visibilité ;
- temps de réaction ;
- capacité d’accélération ;
- vitesse libre ;
- marge de sécurité ;
- etc.
Avantages/inconvénients
Avantages
Les indicateurs de trafic des modèles microscopiques peuvent être individuels, par exemple : vitesses instantanées, temps de parcours, temps inter-véhiculaire, distance inter-véhiculaire, etc.
Ces indicateurs peuvent également être agrégés pour obtenir des informations collectives sur l’écoulement : débit, capacité, temps de parcours moyen, hauteur de remontée de file, etc.
Inconvénients
Les temps de calculs générés lors de la simulation peuvent être long, en particulier :
- s’il existe de la congestion,
- si la modélisation intègre de gros réseaux maillées,
- si le volumes de données mesurées en cours de simulation est important.
Les modèles macroscopiques
Les modèles macroscopiques offrent une représentation agrégée du trafic : il étudient un système qui se rapproche d’un fluide. Les variables définies dans le modèle sont les débits, concentrations et vitesses sur les différents tronçons du réseau modélisé.
Au cours de la simulation, le modèle confronte les offres et les demandes d’écoulement sur les tronçons du réseau.
Les offres d’écoulement correspondent aux capacités des tronçons du réseau. Les capacités peuvent être liées à des constantes de la simulation : nombre de voies, vitesse réglementaire, déclivité. Elles peuvent également varier au cours du temps (feux tricolores).
Les demandes d’écoulement correspondent aux débits souhaitant s’écouler à travers le réseau. Les demandes sont généralement dynamiques, afin de représenter : la montée en charge du réseau, le fonctionnement à charge maximale, la descente de charge. Les demandes ne distinguent généralement pas les différentes classes de véhicules qui compose la demande (demande mono-classe).
La circulation à travers le réseau se fonde alors sur 3 types de modèles :
- les modèles de convergent où des flux se rejoignent,
- les modèles d’écoulement sur un tronçon,
- les modèles de divergent où des flux se divisent.
Modèles de convergent
Lorsque deux flux de demande convergent en un point du réseau, on dit simplement qu’il existe un « convergent ». Il est alors nécessaire de modéliser la manière dont ces flux se mélangent.
Un modèle de convergent hiérarchise les flux : priorité de l’un sur l’autre, partage de la capacité disponible. Il définit l’écoulement relatif des volumes de trafic de chaque branche au niveau du convergent.
Modèle de Daganzo
Le fonctionnement d’un convergent peut être décrit par la figure suivante :

Sur la figure ci-dessus est représentée la courbe de capacité d’un convergent. Elle représente le fait que la capacité disponible au niveau du nœud convergent est constante et égale à C.
Sur cette figure, on trouve également plusieurs aires correspondant aux régimes de fonctionnement possibles du convergent :
- le convergent est totalement fluide ;
- la branche principale du convergent est la seule à être congestionnée ;
- la branche secondaire du convergent est la seule à être congestionnée ;
- les deux branches du convergent sont congestionnées.
Autres modèles
D’autres modèles existent et ont été proposés dans la littérature scientifique :
- J.P. Lebacque, Intersection Modeling, Application to Macroscopic Network Traffic Flow Models and Traffic Management, Trafic and Granular Flow ’03, Part 3, (2005), pp. 261-278 ;
- W.-L. Jin and H. M. Zhang, On the distribution schemes for computing fluxes through a highway merge, Transportation Research Part B, 37(6), (2003), pp. 521-540.
Modèle d’écoulement sur un tronçon
Pour résoudre un modèle macroscopique, on choisit généralement un schéma de Godunov, qui consiste à découper le réseau en cellules de longueur dx, et de procéder au calcul de l’état des cellules par pas de temps dt.
Ainsi, à chaque pas de temps, on fait un bilan de quantité sur chacune des cellules. Ce bilan fait intervenir le demande d’entrée dans la cellule, la concentration actuelle de la cellule et le débit de sortie de la cellule. La solution d’un tel modèle donne les états successifs des cellules pendant la simulation.
Lorsque les cellules sont fluides, la demande de trafic passe librement d’une cellule à l’autre. En revanche, dès lors qu’une cellule est saturée, elle contraint mécaniquement le débit de sortie de la cellule juste en amont. De proche en proche, il est possible de reconstituer les phénomènes de remontées de congestion classiquement observés sur nos réseaux.
Cette description fonctionne pour les sections homogènes d’un réseau. Or, dans la réalité, un réseau est également constitué de nœuds convergents (ex : intersections) et de nœuds divergents (ex : sorties d’autoroute).
Modèle Lighthill-Witham-Richards (LWR)
Le modèle LWR est un modèle macroscopique dont la résolution par automate cellulaire a été proposé par Daganzo (1995). C’est un modèle dit du premier ordre, régi par une simple loi de l’offre et de la demande.
Modèles d’ordres supérieurs
Il existe des modèles macroscopiques plus complexes, tels :
- les modèles d’ordres supérieurs, qui incluent des fonctions de « comportement de flux » complémentaires pour décrire des évolutions de vitesse ou de concentration des véhicules ;
- les modèles cinétiques, qui ont vocations à tenir compte du caractère stochastique du trafic, en considérant que les vitesses sont distribuées.
Modèle de divergent
Lorsque deux flux divergent et se séparent au niveau d’un nœud, nous avons ce qu’on appelle un "divergent". Il s’agit dans ce cas de modéliser la manière dont le flux se séparent. Dans le cas où l’une ou les deux branches en aval du divergent saturent, le modèle décrit la manière dont les flux s’écoulent.
Modèle de Newell
Là encore, le modèle le plus simple est celui de Newell, qui peut être résumé par la figure suivante :

Sur la figure ci-dessus, deux aires représentent les deux régimes fonctionnement d’un convergent :
- l’aire claire correspond à l’état de fonctionnement fluide du divergent. En effet, les demandes à destination des branches 1 et 2 (notée Q1 et Q2) sont inférieures aux capacités des branches avales du divergent (notée C1 et C2). Le divergent est donc entièrement fluide.
- l’aire foncée correspond à l’état congestionné du divergent. La demande vers une (ou chaque) branche avale est supérieure à la capacité de cette branche. Dans ce cas, le nœud divergent sature et impacte l’ensemble des véhicules se présentant sur le divergent.
Ce modèle, très simple, considère que les véhicules ne peuvent pas se dépasser entre eux. Ainsi, les véhicules subissent le même retard quelle que soit leur destination finale. Cette hypothèse est assez forte et ne correspond pas à la réalité, notamment lorsque la branche en amont du divergent présente plusieurs voies de circulation.
Autres modèles
Des modèles de divergent ont été proposés afin de palier aux limites du modèle de Newell, notamment :
- Wen-Long Jin, Analysis of kinematic waves arising in diverging traffic flow models, Submitted on 24 Sep 2010
Avantages/inconvénients
Avantages
- Il s’agit d’un modèle dynamique ;
- La vision agrégée du trafic est pertinente sur les réseaux « grandes mailles » de type VSA ;
- Le calcul de la simulation est rapide car le temps de calcul ne dépend que de la taille des cellules ;
- Les résultats peuvent être visualisés sous forme de « traficolor » et il est possible de construire des indicateurs agrégés comme la vitesse moyenne par cellule ou par section.
Inconvénients
- Le modèle ne permet pas une représentation fine du trafic (changements de voie, accélération des véhicules) parfois utile pour reconstituer certains phénomènes de trafic ;
- Sur les réseaux maillés, il est difficile d’affecter le trafic lorsque le modèle fournit des volumes non entiers ou inférieurs à l’unité, et n’ayant physiquement pas de sens.
- Il n’est pas possible de passer en simulation microscopique pour visualiser la trajectoires de véhicules ;
- Seules des vitesses moyennes par tronçon sont calculées (pas de représentation de stop & go).
Les modèles mésoscopiques
La définition du terme « mésoscopique » varie selon la discipline et les auteurs.
C’est une représentation intermédiaire entre la représentation microscopique qui contient toutes les trajectoires des véhicules et la représentation macroscopique qui calcule l’état moyen par tronçon.
Ici, on présente une représentation mésoscopique consistant à calculer les instants de passages de chaque véhicule en des points remarquables du réseau. Elle contient donc de l’information individuelle (instants de passage) à partir de laquelle il est possible de reconstituer des informations collectives (ex : temps de parcours par origine-destination).
Variables
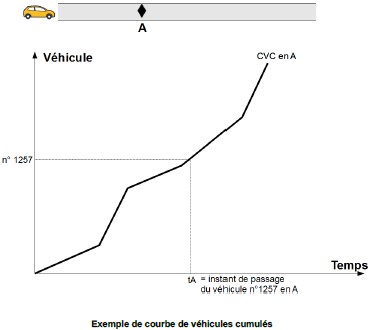
La variable de cette modélisation est la courbe de véhicules cumulés (CVC) en un point de comptage du réseau.
Pour construire une CVC, les véhicules sont numérotés selon leur ordre de passage au point de comptage. La CVC représente alors l’évolution des numéros des véhicules en fonction de leur instant de passage. La figure suivante présente un exemple de CVC.
Modèle d’écoulement
Le modèle mésoscopique d’écoulement décrit la manière dont les véhicules passent d’un nœud du réseau à l’autre. Les nœuds sont généralement les lieux de singularités géométriques : convergent, divergent, réduction du nombre de voies, changement de vitesse réglementaire, etc. Les nœuds sont les extrémités des sections homogènes du réseau et permettent de les relier entre elles.

Lorsqu’un véhicule passe par un nœud (par exemple le nœud A), il s’engage sur une section homogène et il est possible de calculer son instant de demande de passage (t) au nœud suivant. Selon les conditions d’écoulement sur la section, le véhicule franchira le nœud B à cet instant de demande de passage, ou à un instant ultérieur s’il subit un retard le long de la section homogène.
Au cours d’une simulation mésoscopique, le modèle est résolu de manière « événementielle », pour signifier que les instants de passage sont calculés chronologiquement, à chaque fois qu’un véhicule doit passer un nœud.
Modèle de convergent/divergent
Le modèle d’écoulement mésoscopique doit être complété par un modèle de convergent et un modèle de divergent.
Modèle de convergent
Lorsque deux véhicules issus de deux sections différentes convergent vers le même nœud, différentes situation peuvent se produire :
- Si le nœud convergent n’est pas saturé par l’aval, alors c’est le premier véhicule qui se présente qui est servi et le second véhicule subit un léger retard ;
- si le nœud convergent est saturé par l’aval, alors deux véhicules se « partagent » la priorité avale, l’un ayant une probabilité alpha de passer en premier, l’autre ayant une probabilité (1-alpha) de passer.
Ce modèle de convergent est cohérent avec le modèle macroscopique présenté ici. Il peut être modifié afin de prendre en compte des particularités du trafic telles que les chutes de capacité.
Modèle de divergent
Lorsqu’un véhicule est créé sur le réseau, on lui attribue un chemin (succession de nœuds) pour lui permettre de rejoindre sa destination. Ainsi, lorsqu’un véhicule se présente sur un divergent, il connaît à l’avance son chemin. Les répartitions des véhicules aux divergents sont donc définies a priori.
Avantages/inconvénients
Les avantages sont :
- la rapidité des calculs ;
- le faible nombre de paramètres ;
- la possibilité de faire de l’affectation (contrairement au modèle macroscopique).
L’inconvénient principal est la difficulté à représenter des effets très locaux du trafic (ex : zones d’entrecroisement).